|

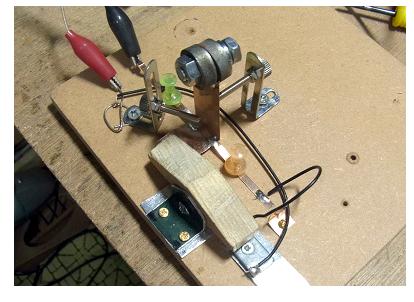
□↑ (14-5)操作ボタンの左を押し下げて、短点振動板が手前に振動し、短点連続出力中 □
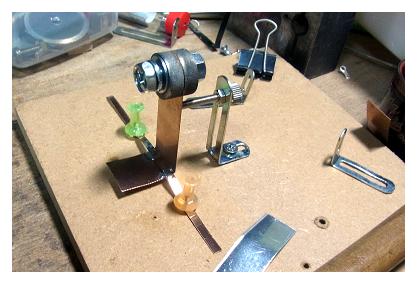
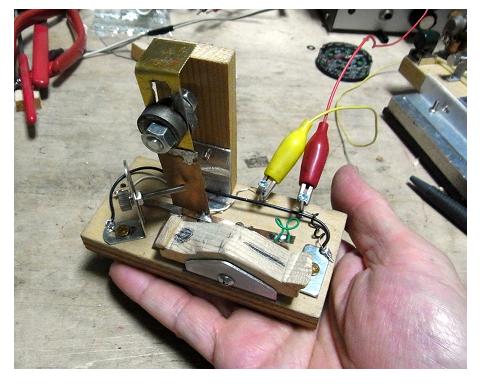
電池ブザーをつないで動きを確かめます。重りのネジは別の銅板に固定し、それを振動板にクリップで仮止めして上下させます。短点接点のネジもLアングルの溝により上下に移動できます。これは下に持っていくと短点速度は遅く、上に持っていくと早くなります。
重りと接点の位置調整で速度や短点そのものの長さが変わります。
肝心な操作感覚ですが、短点を親指、長点を人先指で押す操作は、縦振れというより必然的に手首を左右に回転する動きとなり、最近作った回転式複式に似たような操作感になりました。ノブの両脇を押さえるように操作するので、指が滑り落ちないように両端に突起状のものがあれば良いかな? とも感じました。
ともかく、キイ本体を固定するための重り無しで使えるという点はクリアできました。こういった操作は初めてなので、まだぎこちないですが、しばらく練習しながら、気になる点を洗い出し、今後作ることになるであろう、正式版の製作に生かしていくつもりです。
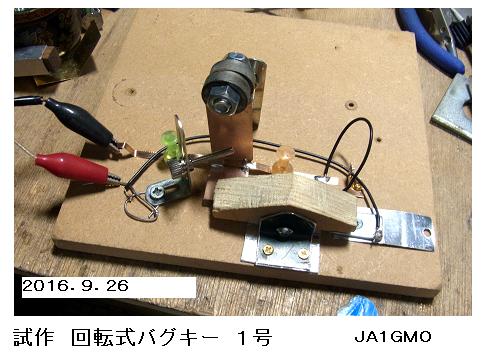
このままではまだ、実際の交信には使う自信はありません。(記:2016年 9月29日) JA1GMO
|